Table of Contents
LongCat-Video Technical Report Link to LongCat-Video Technical Report
https://arxiv.org/abs/2510.22200
https://huggingface.co/papers/2510.22200
一、Model Architecture Link to 一、Model Architecture
WAN2.1 VAE:(时间,高度,宽度)4×8×8压缩比
DiT模型中的分块操作进一步将潜在变量压缩,额外压缩比为1×2×2
因此,从像素到潜在变量的整体压缩比达到4×16×16
二、Block Attention With KV Cache Link to 二、Block Attention With KV Cache

公式(1): 条件帧的注意力计算 仅依赖自身 —— 条件帧的查询 、键 、值 均来自 ,不与待去噪帧的键 / 值交互。
目的:确保条件帧的内容(如 Image-to-Video 的参考图像、Video-Continuation 的已有帧)不被待去噪帧的噪声干扰,维持生成的基础逻辑稳定。
公式(2): 待去噪帧的注意力计算 依赖自身 + 条件帧 —— 待去噪帧的查询 会同时关注 “条件帧的键值 ” 和 “自身的键值 ”。
目的:让待去噪帧(生成帧)学习条件帧的内容逻辑,例如在 Video-Continuation 中,后续生成的 50 帧会参考前 10 帧的人物动作、场景光影,确保时序连贯。
在长视频生成中,条件帧的数量可能很多,若每次采样都重新计算条件帧的键值 ,会造成大量重复计算
- 缓存逻辑: 条件帧的 和 仅在第一次计算后缓存到内存中,后续所有采样步骤(如续播多段帧)直接复用缓存结果;
- 优势: 既确保训练与推理过程中条件帧的一致性,又大幅减少长视频生成的计算量,提升推理效率。
三、Efficent Video Generation Link to 三、Efficent Video Generation
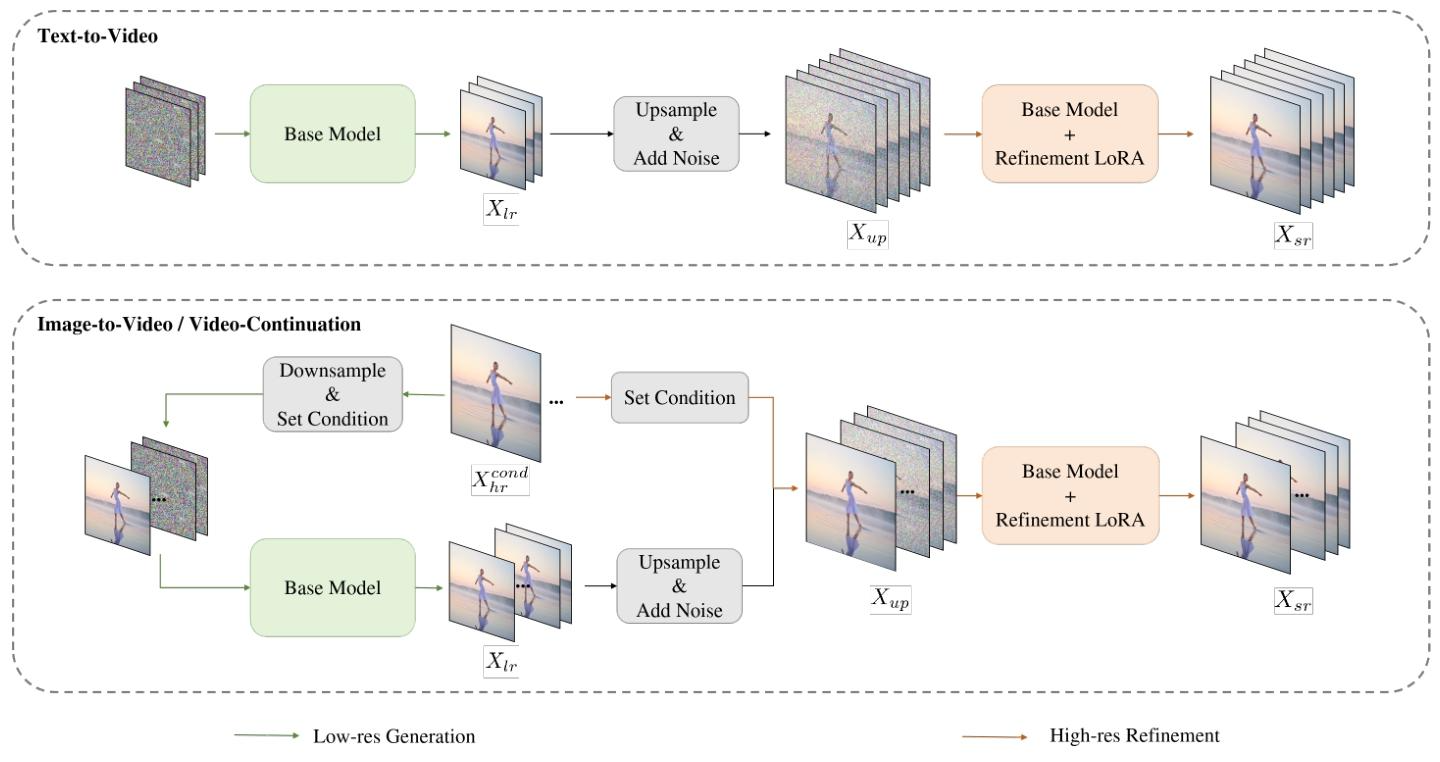
1. Coarse-to-Fine Generation Link to 1. Coarse-to-Fine Generation
第一阶段:生成低分辨率(LR)基础视频 Link to 第一阶段:生成低分辨率(LR)基础视频
- 目标: 快速搭建视频的“结构框架”,包括场景布局、人物动作轨迹、时序逻辑;
- 配置: 生成 480p、15fps 的视频,采样步数 16 步(蒸馏后),确保快速出结果;
- 核心: 不追求细节,重点保证结构完整、时序连贯,为后续优化打基础。
第二阶段:高分辨率(HR)优化与帧率提升 Link to 第二阶段:高分辨率(HR)优化与帧率提升
- 上采样预处理: 用三线性插值将 480p、15fps 视频放大至 720p、30fps,保留基础结构,但此时画面会有模糊、纹理缺失等问题;
- 优化专家训练: 训练专门的“精细化专家 LoRA 模块”,基于基础模型微调,专注于“修正模糊、补充细节、提升帧率一致性”;
- 流匹配建模: 用流匹配算法建模“上采样低质视频”与“目标高质视频”的分布映射,具体逻辑:
- 输入:上采样后的视频 latent + 适度噪声 ,避免过度修改基础结构;
- 目标:学习从“带噪上采样视频”到“720p、30fps 高质视频”的平滑过渡,仅需 5 步采样;
- 数值约束:对 velocity(速度场)进行数值缩放,确保与基础模型的数值范围一致,保证生成连贯性。
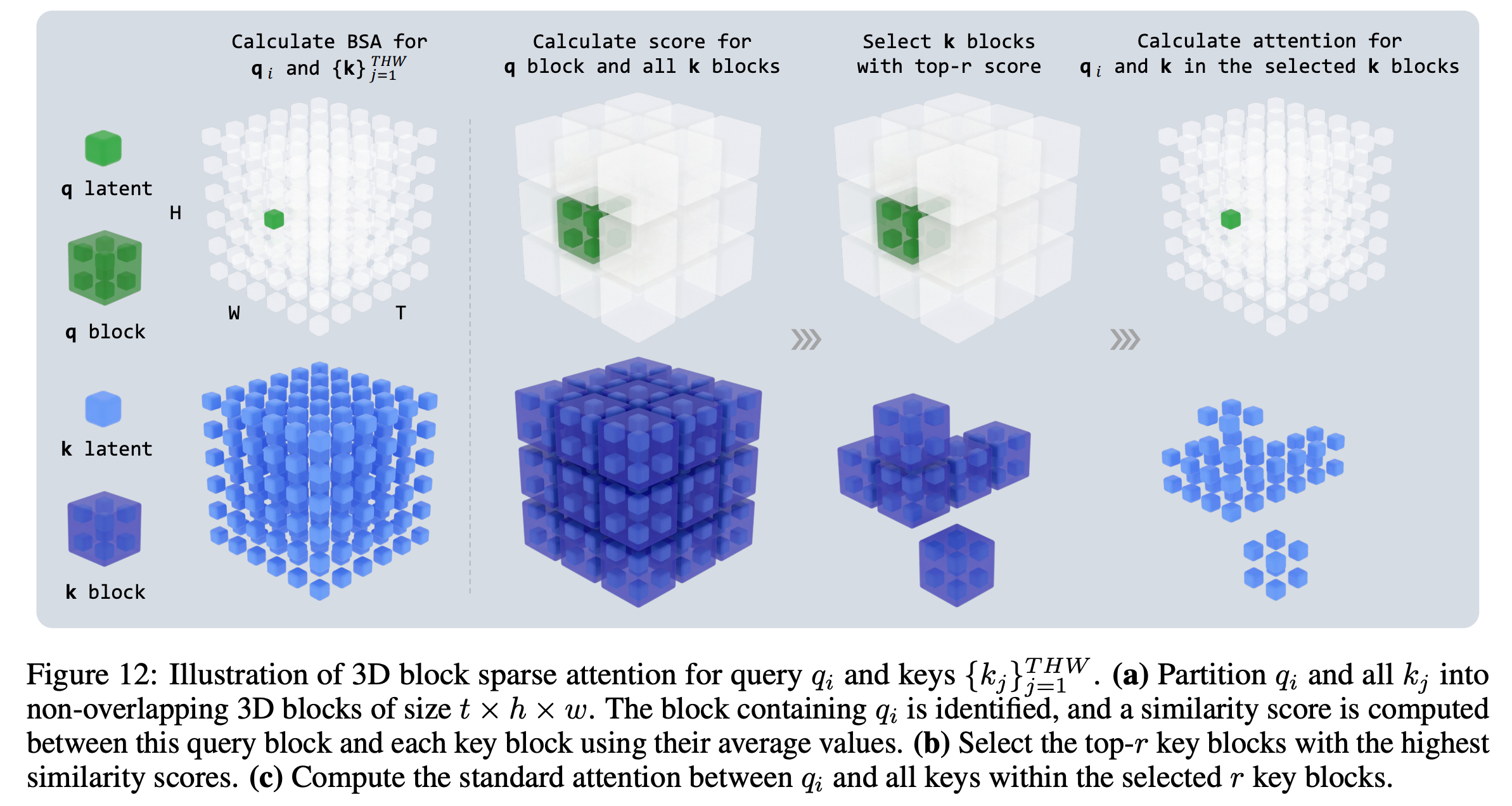
2.Block Sparse Attention Link to 2.Block Sparse Attention
(1)块稀疏注意力(Block Sparse Attention)的建模 Link to (1)块稀疏注意力(Block Sparse Attention)的建模
3D 块重排(3D Block Rearrangement)
我们考虑一个形状为 的视频序列,其在内存中的存储顺序为 。
该序列被划分为 个三维块(3D blocks),其中 , , ,
每个块的形状为 。
这些块在内存中的排列顺序为 (块级顺序), 并且在每个块内,元素按 (块内顺序)排列。
经过这种重排后,我们得到一个重新排序的序列。
块选择掩码的构建(Block Selection Mask Construction)
设 为重排后的输入张量。
我们使用可学习的权重矩阵 和 来计算查询(query)矩阵 和键(key)矩阵 :
其中 是批量大小(batch size), 是注意力头(attention heads)的数量, 和 分别是查询和键的序列长度(在本例中 ), 是特征维度(feature dimension)。
为降低计算成本,我们在每个块内执行平均池化(average pooling)。
设 为每个块的元素数。
池化后的查询 和键 定义为:
其中 ,,分别表示查询块与键块的数量。
池化后的得分矩阵 计算如下:
其中 表示对最后两个维度的转置。
对于每个查询块 , 我们选择得分最高的前 个键块。
据此可以构建一个二值掩码矩阵 ,定义如下:
带块选择掩码的注意力计算(Attention with Block Selection Mask)
最后,我们计算加掩码的注意力。
注意力得分矩阵 定义为:
其中 表示对最后两个维度的转置。
然后我们应用掩码:
最终的注意力权重通过对最后一个维度应用 softmax 得到:
(2)环形块稀疏注意力(Ring Block Sparse Attention)在上下文并行中的建模 Link to (2)环形块稀疏注意力(Ring Block Sparse Attention)在上下文并行中的建模
我们将稀疏注意力计算扩展到上下文并行(context parallelism)。
给定一个张量并行的规模 ,每个并行 rank 维护输入张量 的局部片段。
设
分别表示第 个 rank 的查询(query)、键(key)和值(value)张量。
局部块选择掩码的构建(Local Block Selection Mask Construction)
为了计算第 个 rank 的块稀疏注意力掩码 ,
每个 rank 首先计算其自身的局部池化键(local pooled keys):
其中
然后我们收集所有池化键的表示,并计算 rank 的池化得分矩阵:
其中符号 表示沿序列维度的拼接, 并且
根据 ,掩码 通过为每个批次和注意力头选择前 个最高分的键块(key block)构建而成。
为了优化效率,我们采用一种环形注意力(ring-attention)通信模式, 使得局部池化得分的计算与相邻 rank 间的 张量通信相互重叠
带有局部块选择掩码的环形注意力(Ring Attention with Local Block Selection Mask)
一旦获得 ,每个 rank 就会根据 计算其注意力输出 ,其中 是与 rank 对应的掩码块。
在线 softmax 算法用于该过程。 此外,环形注意力算法(Ring-attention,Liu et al., 2023)被改进以使注意力计算与 的通信重叠执行。
简单总结 Link to 简单总结
背景问题
在普通的自注意力(Self-Attention)中,每个 token 都要和所有其他 token 计算注意力分数:
如果输入序列很长(比如视频帧、图像块),这个计算非常大,复杂度是 。
核心思想:“分块 + 稀疏”
把输入(例如视频的时间-高度-宽度维度)分成多个 3D 小块:
- 每个块内部的信息相似;
- 块之间的联系比块内部稀疏;
- 所以我们只在部分块之间计算注意力,而不是全部。
这样注意力矩阵 就从“密集”变成了“稀疏”,即 Block Sparse Attention(块稀疏注意力)。
怎么选哪些块要计算?——“块选择掩码 Mask”
每个块会先做平均池化(pooling),得到一个代表性的“块向量”;
计算所有块之间的相似度(得分矩阵 );
为每个查询块挑出得分最高的前 个键块;
构建一个二值掩码 :
- → 这两个块要计算注意力;
- → 不计算。
最后用 掩码掉不需要计算的部分,只对重要块做 softmax。
这样,计算量大大降低,但还能保持模型对重要关系的捕捉。
LongCat-Video Technical Report
© JuneSnow | CC BY-SA 4.0